Exoskeleton
Intermediate Team
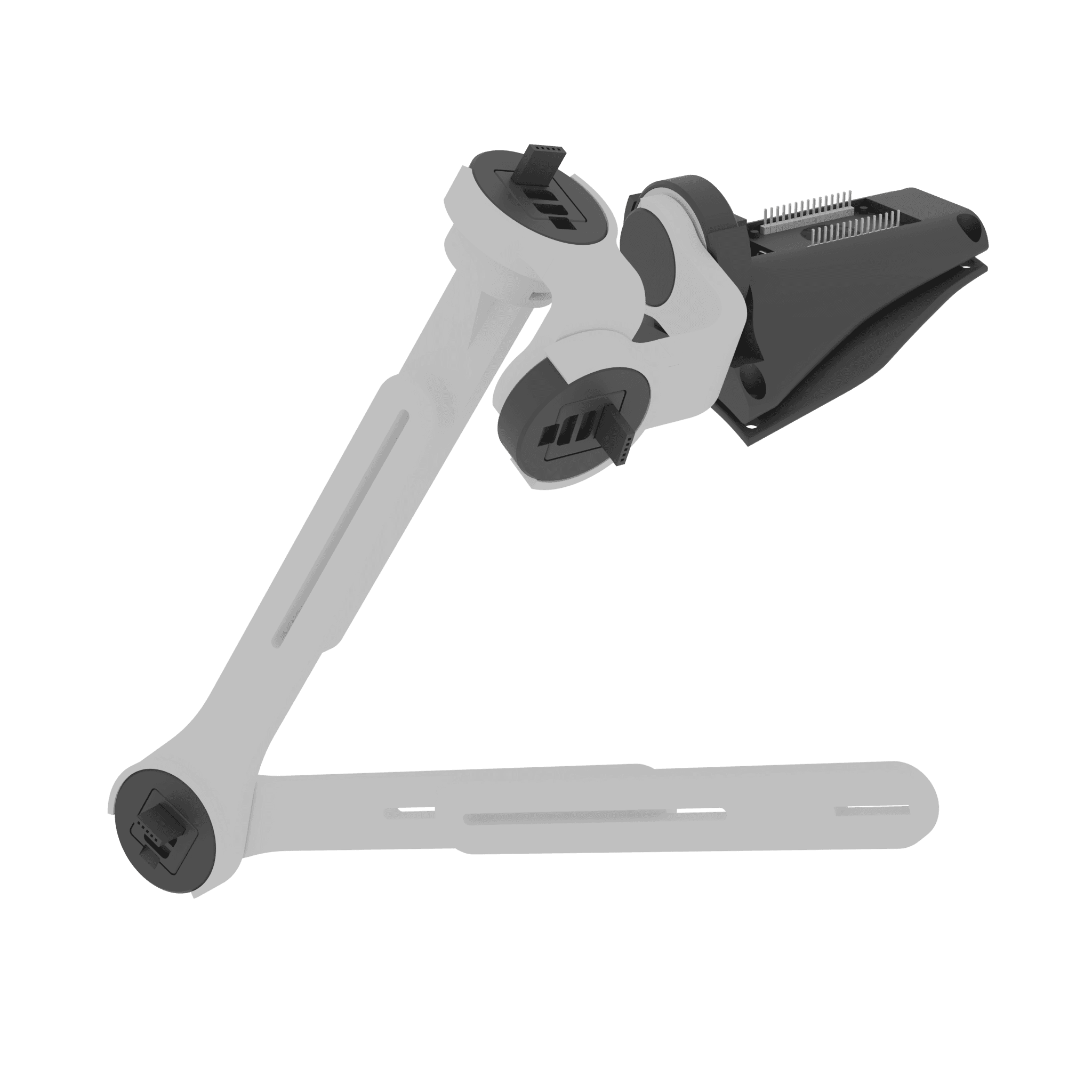
A digital render of the "Leader Arm" currently in development.
The Exoskeleton Team is currently working on a Teleoperations system which will allow a user to remotely control a robot over Wi-Fi using their own arms. This project is aimed at assisted lifting and hazardous materials handling.

Actuator testing.